

水下無(wú)人平臺(tái)自主探測(cè)技術(shù)是水下無(wú)人平臺(tái)完成使命任務(wù)的重要保障,在軍事國(guó)防領(lǐng)域占有舉足輕重的地位,,其研究?jī)?nèi)容涉及水下無(wú)人平臺(tái)結(jié)構(gòu)與水動(dòng)力,、水下定位與導(dǎo)航,、任務(wù)自適應(yīng)規(guī)劃,、自主控制,、數(shù)據(jù)傳輸與通信,、動(dòng)力推進(jìn),、任務(wù)載荷、目標(biāo)自主探測(cè)與跟蹤,、目標(biāo)屬性自主判別及共性基礎(chǔ)技術(shù)等領(lǐng)域,,是當(dāng)前國(guó)際研究的前沿?zé)狳c(diǎn)。水下聲學(xué)滑翔機(jī)屬于水下無(wú)人平臺(tái)自主探測(cè)研究領(lǐng)域,,其在環(huán)境觀測(cè)型水下滑翔機(jī)技術(shù)基礎(chǔ)上,,綜合考慮了平臺(tái)電磁兼容性及聲學(xué)特性,搭載聲學(xué)傳感器及信號(hào)處理系統(tǒng),,具備海洋環(huán)境噪聲采集,、水聲信號(hào)采集、聲紋記錄,、數(shù)據(jù)處理及上浮通信等功能,,可用于完成敏感海域或拒止區(qū)域移動(dòng)目標(biāo)自主探測(cè)、跟蹤,、屬性判別和信息回傳等任務(wù),。
一、水下聲學(xué)滑翔機(jī)研究現(xiàn)狀
⒈國(guó)外研究現(xiàn)狀
國(guó)外在水下滑翔機(jī)集成聲學(xué)傳感器方面起步較早,,且成果顯著,,尤以美國(guó)最為突出。
2010年5月7日,,葡萄牙科研工作者在西太平洋勞盆地(Laubasin)北部布放搭載水聽(tīng)器的Slocum水下聲學(xué)滑翔機(jī)(見(jiàn)圖1),,用于監(jiān)測(cè)西馬塔(WestMata)的海下火山,記錄了隨距離變化的聲波振幅,,證明了地質(zhì)變化將使該地區(qū)噪聲水平上升,。試驗(yàn)結(jié)果表明,水下聲學(xué)滑翔機(jī)用于水聲監(jiān)測(cè)的效果可以與水下自主水聽(tīng)器相媲美;2013年5月,,葡萄牙阿爾加維大學(xué)又在葡萄牙海岸布放了搭載SR-1水聽(tīng)器的Slocum用于探測(cè)水下噪聲,,結(jié)果表明,其可對(duì)水下噪聲進(jìn)行時(shí)間和空間尺度上的有效探測(cè),。

圖1 搭載水聽(tīng)器的Slocum

圖2 搭載水聽(tīng)器的Seaglider
美國(guó)研制的Seaglider水下聲學(xué)滑翔機(jī)尾部艙段集成了5Hz~30kHz全向聲壓水聽(tīng)器(見(jiàn)圖2),,并配有數(shù)據(jù)采集與存儲(chǔ)設(shè)備,聲學(xué)設(shè)備動(dòng)態(tài)范圍120dB,、本底噪聲低至34dB。2006年8月,,科研人員在加利福尼亞州蒙特利灣布放了3臺(tái)Sea-glider水下聲學(xué)滑翔機(jī),,共獲取401個(gè)剖面、107小時(shí)的聲學(xué)數(shù)據(jù),,采集到了藍(lán)鯨,、座頭鯨和抹香鯨的叫聲。此次試驗(yàn)航行時(shí)間達(dá)40天,,航行里程達(dá)200km,,取得了較好的試驗(yàn)效果。
ANT公司在美國(guó)海軍研究辦公室的資助下研制的一款淺海聲學(xué)滑翔機(jī)ANTLittoralGlider(見(jiàn)圖3),,搭載有Reson公司的TC-4033型水聽(tīng)器和Wilcoxon的矢量水聽(tīng)器,,其獨(dú)特的設(shè)計(jì)特別適合在近海工作。在6年的研制周期內(nèi),,ANT公司共為美國(guó)海軍制造了18套ANTLittoralGlider,,累積作業(yè)4500小時(shí)。

圖3 ANT公司的淺?;铏C(jī)
美國(guó)斯克里普斯海洋研究所海洋物理實(shí)驗(yàn)室和華盛頓大學(xué)應(yīng)用物理實(shí)驗(yàn)室合作設(shè)計(jì)的翼身融合水下聲學(xué)滑翔機(jī)(XRay和ZRay,,見(jiàn)圖4),采用翼身融合結(jié)構(gòu),,可實(shí)現(xiàn)翼展水平距離最大化和功率消耗最小化,,最大限度地提高其探測(cè)和定位能力。該滑翔機(jī)利用獨(dú)特的翼身融合設(shè)計(jì)可獲得較快的水下航行速度,,使升力面積最大且增加了內(nèi)部體積,,可用于攜帶戰(zhàn)術(shù)有關(guān)的聲學(xué)傳感器,使其適合于警戒和其他遙測(cè)任務(wù),。
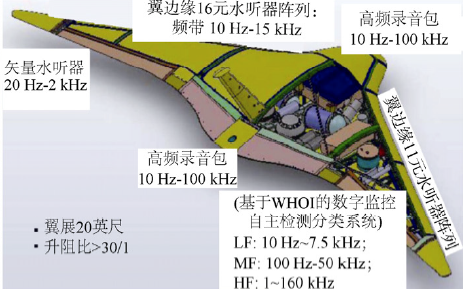

圖4 Xray和Zray水下聲學(xué)滑翔器
ZRay的兩機(jī)翼前緣中安裝了1個(gè)27元水聽(tīng)器陣列,,水聽(tīng)器工作頻帶10Hz~15kHz,陣列信號(hào)輸出到1個(gè)實(shí)時(shí)檢測(cè)/定位和記錄系統(tǒng),;該水下聲學(xué)滑翔機(jī)同時(shí)搭載有矢量水聽(tīng)器,,頻率為20Hz~2kHz。除此以外,ZRay還嘗試拖曳1個(gè)32元拖曳線列陣,,該陣列由太平洋空間和海軍作戰(zhàn)系統(tǒng)中心設(shè)計(jì)和建造,,并將配備1個(gè)來(lái)自伍茲霍爾海洋研究所的3通道低(10Hz~7.5kHz)、中(100Hz~50kHz),、高(1kHz~160kHz)頻數(shù)字監(jiān)控自主檢測(cè)分類系統(tǒng),。
該水下聲學(xué)滑翔機(jī)可以以1~3kn的航速續(xù)航6個(gè)月,其設(shè)計(jì)初衷是用來(lái)跟蹤和自動(dòng)識(shí)別海洋哺乳動(dòng)物,,目前已應(yīng)用于圣地亞哥海底被動(dòng)聲學(xué)自主監(jiān)測(cè)海洋哺乳動(dòng)物項(xiàng)目,。由于其優(yōu)異的聲學(xué)探測(cè)性能,ZRay還可用來(lái)探測(cè)安靜級(jí)柴電潛艇,,是美軍持久性沿海海底監(jiān)視網(wǎng)(PlusNet)的一部分,。
⒉國(guó)內(nèi)研究現(xiàn)狀
國(guó)內(nèi)在水下滑翔機(jī)平臺(tái)集成聲學(xué)傳感器方面基本與美國(guó)保持同步。受國(guó)家“863”計(jì)劃資助,,2014年,,中國(guó)海洋大學(xué)和中科院聲學(xué)所聯(lián)合研制了一型聲學(xué)滑翔機(jī),該型滑翔機(jī)的艏部艙段為聲學(xué)探測(cè)艙,,電子系統(tǒng)位于滑翔機(jī)電子艙內(nèi),,二者通過(guò)電纜連接,已先后開展了消聲水池,、湖上及海上試驗(yàn)(見(jiàn)圖5),。

圖5 水下滑翔機(jī)海上試驗(yàn)
該型滑翔機(jī)系統(tǒng)最大工作深度1500m,懸?;蜃讜r(shí),,最低工作頻率10Hz;滑翔時(shí),,最低工作頻率500Hz,。設(shè)計(jì)指標(biāo)為:在良好水文條件下,對(duì)水下聲源譜級(jí)不小于125dB(@1kHz)的目標(biāo),,單節(jié)點(diǎn)探測(cè)作用距離不小于3km,。
西北工業(yè)大學(xué)基于飛翼滑翔機(jī)研發(fā)了搭載多元聲壓陣列的飛翼滑翔機(jī)聲學(xué)探測(cè)系統(tǒng),并進(jìn)行了湖上測(cè)試,。哈爾濱工程大學(xué)利用“海燕”水下滑翔機(jī)共裝載了4個(gè)聲壓水聽(tīng)器,,在滑翔機(jī)左翼、右翼,、前導(dǎo)流罩和尾翼各安裝1個(gè)水聽(tīng)器構(gòu)成4元聲學(xué)感知單元,,并在南海海域進(jìn)行了海上試驗(yàn),利用73Hz低頻聲源信號(hào)對(duì)系統(tǒng)的探測(cè)能力進(jìn)行驗(yàn)證,。試驗(yàn)期間,,水下聲學(xué)滑翔機(jī)共完成17個(gè)剖面的性能測(cè)試,,其中滑翔機(jī)控制功能測(cè)試3個(gè)剖面,噪聲特性測(cè)試7個(gè)剖面,,低頻聲源信號(hào)探測(cè)能力測(cè)試7個(gè)剖面,,平臺(tái)最大下潛深度1000m。通過(guò)對(duì)記錄的噪聲數(shù)據(jù)進(jìn)行分析表明,,該聲學(xué)感知單元可有效接收低頻聲源發(fā)射的噪聲數(shù)據(jù),。
海軍潛艇學(xué)院和天津大學(xué)通過(guò)對(duì)現(xiàn)有“海燕”水下滑翔機(jī)進(jìn)行聲學(xué)特性及電磁兼容性優(yōu)化設(shè)計(jì)和減振降噪處理,集成矢量水聽(tīng)器探測(cè)單元及其信號(hào)處理設(shè)備,,設(shè)計(jì)水聲信號(hào)處理機(jī)艙室,,研發(fā)了“海豚號(hào)”水下聲學(xué)滑翔機(jī)原理樣機(jī)(見(jiàn)圖6),該樣機(jī)可自主完成水中目標(biāo)噪聲信息獲取,、自主探測(cè),、聲學(xué)信號(hào)跟蹤、目標(biāo)屬性自主判別及快速上浮,,整個(gè)流程無(wú)需人工干預(yù),初步具備對(duì)目標(biāo)的自主探測(cè)能力,。

圖6 “海豚號(hào)”水下聲學(xué)滑翔機(jī)
二,、系統(tǒng)組成及功能
⒈系統(tǒng)組成
水下聲學(xué)滑翔機(jī)一般由水下聲學(xué)滑翔機(jī)平臺(tái)分系統(tǒng)、任務(wù)載荷分系統(tǒng),、數(shù)據(jù)傳輸與通信分系統(tǒng),、甲板調(diào)試與控制分系統(tǒng)及布放回收分系統(tǒng)5部分組成。
⑴平臺(tái)分系統(tǒng)通過(guò)對(duì)自身浮力和姿態(tài)的調(diào)節(jié)來(lái)完成無(wú)動(dòng)力水下滑翔,,包括平臺(tái)主體結(jié)構(gòu)子系統(tǒng),、浮力驅(qū)動(dòng)子系統(tǒng)、姿態(tài)調(diào)節(jié)與能源子系統(tǒng),,以及導(dǎo)航與控制子系統(tǒng),,可承受一定的耐壓深度,具備任務(wù)載荷搭載能力,;
⑵任務(wù)載荷分系統(tǒng)包括海洋環(huán)境觀測(cè)傳感器,、聲學(xué)傳感器及水聲信號(hào)處理機(jī),可完成海洋水文環(huán)境觀測(cè)和水下目標(biāo)探測(cè)任務(wù),;
⑶數(shù)據(jù)傳輸與通信分系統(tǒng)包括衛(wèi)星天線,、接收機(jī)和控制軟件等,可實(shí)現(xiàn)水下滑翔機(jī)與甲板調(diào)試與控制分系統(tǒng)的水文環(huán)境與聲學(xué)數(shù)據(jù)近實(shí)時(shí)傳輸,、任務(wù)指令下達(dá)和應(yīng)急調(diào)度,;
⑷甲板調(diào)試與控制分系統(tǒng)包括實(shí)時(shí)顯示與狀態(tài)監(jiān)控、指揮與控制軟件,、多源信息接入與處理,、目標(biāo)態(tài)勢(shì)展現(xiàn)等模塊,,用于完成水下聲學(xué)滑翔機(jī)布放前設(shè)備測(cè)試與參數(shù)設(shè)置、布放后任務(wù)指令下達(dá)與遙測(cè)數(shù)據(jù)接收,、水下聲學(xué)滑翔機(jī)狀態(tài)監(jiān)控,、指揮控制及應(yīng)急機(jī)動(dòng)調(diào)度以及探測(cè)目標(biāo)態(tài)勢(shì)展現(xiàn)等任務(wù);
⑸布放回收分系統(tǒng)主要包括多關(guān)節(jié)機(jī)械臂,、可靠抓取機(jī)械手,、可移動(dòng)水面機(jī)器人等部分,用于水面船和無(wú)人水面航行器對(duì)水下聲學(xué)滑翔機(jī)的布放和回收,。
相比于普通海洋環(huán)境觀測(cè)型水下滑翔機(jī),,水下聲學(xué)滑翔機(jī)主要具有如下特點(diǎn)。
①聲學(xué)與電磁兼容性更優(yōu),。水下聲學(xué)滑翔機(jī)對(duì)系統(tǒng)噪聲,、電磁兼容性要求更為苛刻,需要對(duì)系統(tǒng)進(jìn)行聲學(xué)與電磁兼容性優(yōu)化設(shè)計(jì),。
②水動(dòng)力特性要求更高,。水下聲學(xué)滑翔機(jī)由于加裝了聲學(xué)系統(tǒng),平臺(tái)外形和整體結(jié)構(gòu)會(huì)不同程度的改變,,增加其水動(dòng)力特性分析難度,。
③信息處理更智能。除水下滑翔機(jī)常規(guī)導(dǎo)航,、控制等信息自主處理外,,聲學(xué)系統(tǒng)還需要具備目標(biāo)自主探測(cè)和判別,并需要根據(jù)判別結(jié)果,,完成同水下滑翔機(jī)主控系統(tǒng)的信息交互,。
⒉系統(tǒng)功能
水下聲學(xué)滑翔機(jī)主要用于海洋環(huán)境精細(xì)化觀測(cè)、海洋環(huán)境噪聲測(cè)量和海洋目標(biāo)監(jiān)測(cè),,其具體功能如下:
⑴具有水聲環(huán)境長(zhǎng)時(shí)序,、大范圍和精細(xì)化測(cè)量功能,利用溫鹽深(CTD)剖面測(cè)量?jī)x完成全面,、準(zhǔn)確和長(zhǎng)時(shí)的三維空間溫度,、鹽度和深度數(shù)據(jù)采集;
⑵具有海洋環(huán)境噪聲的測(cè)量與記錄功能,,利用滑翔機(jī)搭載的水聲傳感器完成大范圍,、長(zhǎng)時(shí)效、多深度海洋環(huán)境噪聲數(shù)據(jù)的采集和記錄,;
⑶具有水下移動(dòng)目標(biāo)聲學(xué)自主探測(cè),、聲學(xué)信號(hào)跟蹤、識(shí)別及信息回傳功能,。
三,、關(guān)鍵技術(shù)
⒈聲學(xué)減振降噪技術(shù)
水下聲學(xué)滑翔機(jī)結(jié)構(gòu)復(fù)雜,,包含較多的執(zhí)行單元與結(jié)構(gòu)件,且各單元的振動(dòng)相互耦合,,為復(fù)雜的多體系統(tǒng),,如何確認(rèn)激勵(lì)源、確定振動(dòng)的傳播路徑及各單元振動(dòng)耦合情況,,最終獲得聲學(xué)探測(cè)單元對(duì)此激勵(lì)源的響應(yīng)情況,,并據(jù)此開展有針對(duì)性的減振降噪,是水下聲學(xué)滑翔機(jī)目標(biāo)探測(cè)應(yīng)用亟需解決的關(guān)鍵問(wèn)題,。
2016年1月,,我國(guó)學(xué)者在消聲水池測(cè)試了“海燕”水下滑翔機(jī)電池滑動(dòng)、油泵啟動(dòng)及螺旋槳推進(jìn)等工況輻射噪聲級(jí),,并根據(jù)測(cè)試結(jié)果分析了水下滑翔機(jī)主要噪聲源,,及噪聲對(duì)矢量水聽(tīng)器各通道接收信號(hào)的影響,提出了水下滑翔機(jī)減振降噪技術(shù)方案,,優(yōu)化了水下滑翔機(jī)目標(biāo)探測(cè)應(yīng)用聲學(xué)系統(tǒng)工作時(shí)序,。2016年8月,中科院聲學(xué)所在南海某海域開展了基于“海燕”水下聲學(xué)滑翔機(jī)的海洋環(huán)境噪聲觀測(cè)試驗(yàn),,由于水下聲學(xué)滑翔機(jī)自噪聲影響,,導(dǎo)致800Hz和1600Hz高頻段海洋環(huán)境噪聲譜級(jí)大于100Hz和200Hz的低頻段。因此,,對(duì)水下聲學(xué)滑翔機(jī)各工況下的輻射噪聲進(jìn)行有效測(cè)量,,得到其自噪聲源分布及其特性,,是指導(dǎo)減振降噪措施實(shí)施和平臺(tái)優(yōu)化的前提,。
⒉自主控制技術(shù)
自主控制技術(shù)是目前國(guó)際研究的熱點(diǎn)之一,決定著水下滑翔機(jī)的智能化水平與任務(wù)執(zhí)行能力,。由于水下滑翔機(jī)運(yùn)行模式較為簡(jiǎn)單,,為保持其在續(xù)航能力方面的優(yōu)勢(shì),水下滑翔機(jī)一般搭載性能較低的單片機(jī)系統(tǒng),,難以運(yùn)行大規(guī)模,、復(fù)雜的人工智能算法。目前水下滑翔機(jī)自主控制技術(shù)研究主要集中在基于環(huán)境感知的自適應(yīng)任務(wù)控制,、軌跡規(guī)劃以及控制系統(tǒng)與聲學(xué)系統(tǒng)信息交互等方面,。
鑒于水下滑翔機(jī)自身計(jì)算能力與通信等方面的限制,對(duì)于復(fù)雜的控制算法及大規(guī)模的編隊(duì)控制,,大多借助岸基操控系統(tǒng)將計(jì)算結(jié)果發(fā)送給各水下滑翔機(jī)來(lái)實(shí)現(xiàn)對(duì)其的環(huán)境適應(yīng)性控制,。例如,通過(guò)水下滑翔機(jī)編隊(duì)返回的位置與溫度信息構(gòu)建海洋溫度場(chǎng)模型,,進(jìn)行滑翔機(jī)導(dǎo)航控制,,實(shí)現(xiàn)水下滑翔機(jī)編隊(duì)的環(huán)境自適應(yīng)采樣控制,;結(jié)合航路數(shù)據(jù)、海流及地理數(shù)據(jù),,進(jìn)行滑翔機(jī)任務(wù)路徑規(guī)劃,,避免發(fā)生與船舶相撞、擱淺等危險(xiǎn)事故,。通過(guò)增強(qiáng)水下滑翔機(jī)的軟硬件能力,,可以在滑翔機(jī)上運(yùn)行簡(jiǎn)化的智能控制算法。例如,,Lauren以Slocum水下滑翔機(jī)為基礎(chǔ),,研究了浮力自適應(yīng)調(diào)節(jié)技術(shù),滑翔機(jī)可以根據(jù)不同海域海水密度的變化進(jìn)行自適應(yīng)浮力調(diào)節(jié),;同時(shí)開發(fā)了安全回收算法,,在水下滑翔機(jī)定位異常時(shí),可以自行回到布放點(diǎn)等待回收,。Hans等以Slocum水下滑翔機(jī)為基礎(chǔ),,研究了水下滑翔機(jī)環(huán)境自適應(yīng)采樣控制策略,,通過(guò)低功耗的傳感器進(jìn)行海洋滑翔機(jī)測(cè)量,,結(jié)合滑翔機(jī)內(nèi)部存儲(chǔ)的物理海洋模型,進(jìn)行特定海洋現(xiàn)象識(shí)別,,并自主觸發(fā)高能耗的專業(yè)傳感器進(jìn)行海洋現(xiàn)象測(cè)量,,從而實(shí)現(xiàn)對(duì)水下滑翔機(jī)降耗的目的。水下滑翔機(jī)控制系統(tǒng)與聲學(xué)系統(tǒng)信息交互主要體現(xiàn)在聲學(xué)系統(tǒng)根據(jù)被探測(cè)目標(biāo)的屬性信息,,向主控系統(tǒng)傳輸是否應(yīng)急上浮指令,,如若需要應(yīng)急上浮進(jìn)行信息回傳,控制系統(tǒng)則向螺旋槳發(fā)送啟動(dòng)指令,,進(jìn)行快速上浮,。
⒊多模混合推進(jìn)技術(shù)
傳統(tǒng)水下滑翔機(jī)通過(guò)浮力驅(qū)動(dòng),,結(jié)合水動(dòng)翼實(shí)現(xiàn)滑翔運(yùn)動(dòng),,功耗低,具有大航程,、長(zhǎng)續(xù)航能力等優(yōu)點(diǎn),,然而水下滑翔機(jī)滑翔速度一般在0.5m/s左右,航行容易受海流影響,,同時(shí)不能進(jìn)行水平航行,,作業(yè)能力受限。針對(duì)此,,可通過(guò)集成螺旋槳等輔助推進(jìn)裝置,,使水下聲學(xué)滑翔機(jī)同時(shí)具有推進(jìn)與浮力驅(qū)動(dòng)2種驅(qū)動(dòng)方式,,以便在強(qiáng)流與低密度區(qū)域都可以進(jìn)行輔助推進(jìn)。多?;旌贤七M(jìn)技術(shù)為目前水下滑翔機(jī)研究熱點(diǎn)之一,。例如,Joo建立了混合驅(qū)動(dòng)水下滑翔機(jī)動(dòng)力學(xué)模型,,并對(duì)滑翔機(jī)的運(yùn)動(dòng)特性進(jìn)行了仿真分析,;Khalid等對(duì)混合驅(qū)動(dòng)水下滑翔機(jī)進(jìn)行了研究,并建立了其動(dòng)力學(xué)模型,,采用神經(jīng)網(wǎng)絡(luò)控制算法對(duì)水下滑翔機(jī)進(jìn)行行為預(yù)測(cè)控制,;天津大學(xué)對(duì)水下滑翔機(jī)多模推進(jìn)技術(shù)進(jìn)行了系統(tǒng)研究,成功研發(fā)出“海燕”混合推進(jìn)水下滑翔機(jī),。
⒋聲學(xué)傳感器設(shè)計(jì)及應(yīng)用技術(shù)
聲學(xué)傳感器在水下聲學(xué)滑翔機(jī)集成應(yīng)用需要突破工作深度和矢量水聽(tīng)器緩動(dòng)聲吶平臺(tái)應(yīng)用2項(xiàng)瓶頸技術(shù),。
⑴聲學(xué)傳感器大深度技術(shù)
只有聲學(xué)傳感器實(shí)現(xiàn)大深度工作,才能真正實(shí)現(xiàn)水下聲學(xué)滑翔機(jī)長(zhǎng)時(shí)效,、長(zhǎng)航程隱蔽偵察,。從弱信號(hào)目標(biāo)遠(yuǎn)距離探測(cè)角度,面向于我國(guó)周邊海區(qū),,特別是南海應(yīng)用的水下聲學(xué)滑翔機(jī),,在大深度工作可充分利用深海聲道軸能量聚焦效應(yīng),實(shí)現(xiàn)弱信號(hào)目標(biāo)的遠(yuǎn)距離偵察,;還可以利用深海反轉(zhuǎn)會(huì)聚區(qū),,采用可靠聲路徑方法實(shí)現(xiàn)目標(biāo)的遠(yuǎn)距離探測(cè)。但上述功能的實(shí)現(xiàn)也不可避免地增加了聲學(xué)傳感器的體積和質(zhì)量,,影響了整體水動(dòng)力特性,,因此采用輕質(zhì)耐壓材料和新型換能元件,以達(dá)到體積,、質(zhì)量和耐壓能力的折中,,是聲學(xué)傳感器追求的終極目標(biāo),。
⑵矢量水聽(tīng)器緩動(dòng)聲吶平臺(tái)應(yīng)用技術(shù)
矢量水聽(tīng)器應(yīng)用在水下聲學(xué)滑翔機(jī)緩動(dòng)聲吶平臺(tái)上時(shí),,由于受復(fù)雜海洋環(huán)境中內(nèi)波、潮汐和大洋環(huán)流等影響,,矢量水聽(tīng)器及其聲吶平臺(tái)存在姿態(tài)變化,,聲吶平臺(tái)上矢量水聽(tīng)器探測(cè)的目標(biāo)方位是相對(duì)于自身載體坐標(biāo)系的方位信息,為得到目標(biāo)的準(zhǔn)確方位信息還需測(cè)量矢量水聽(tīng)器相對(duì)于地理坐標(biāo)系的實(shí)時(shí)姿態(tài)信息,,通過(guò)姿態(tài)校正將目標(biāo)方位信息轉(zhuǎn)換到地理坐標(biāo)系,。矢量水聽(tīng)器姿態(tài)測(cè)量難題在一定程度上限制了其工程應(yīng)用,能否準(zhǔn)確獲取聲矢量傳感器實(shí)時(shí)姿態(tài),,是其實(shí)現(xiàn)工程應(yīng)用的關(guān)鍵,。
2007年,,Clay等將傾角(俯仰角和滾動(dòng)角)傳感器和航向角傳感器置于矢量水聽(tīng)器內(nèi),使姿態(tài)傳感器和加速度傳感器單元軸向平行或重合,,成功研制了具備姿態(tài)測(cè)量功能的TV-002型矢量水聽(tīng)器,,并開展相關(guān)海上試驗(yàn)。笪良龍等通過(guò)研發(fā)微機(jī)電系統(tǒng)(MEMS)姿態(tài)傳感器,,并將其集成應(yīng)用于矢量水聽(tīng)器設(shè)計(jì),,研發(fā)了適用于水下聲學(xué)滑翔機(jī)等水下緩動(dòng)聲吶平臺(tái)的實(shí)時(shí)姿態(tài)測(cè)量矢量水聽(tīng)器,并能直接得到探測(cè)目標(biāo)相對(duì)地理坐標(biāo)系的方位信息,,成功解決了矢量水聽(tīng)器在水下緩動(dòng)聲吶平臺(tái)的應(yīng)用難題,。
⒌目標(biāo)自主判別技術(shù)
水聲目標(biāo)噪聲識(shí)別分類是水聲探測(cè)的“瓶頸”,同時(shí)也是關(guān)鍵技術(shù)之一,,其流程是:傳感器或其陣列采集目標(biāo)信號(hào)—數(shù)據(jù)預(yù)處理—特征提取—特征選擇—推理預(yù)測(cè)和識(shí)別分類,。但傳統(tǒng)的水聲目標(biāo)識(shí)別方法需要人工干預(yù)提取目標(biāo)數(shù)據(jù)特征,這一過(guò)程需要操作者具有豐富水聲信號(hào)處理知識(shí)和專業(yè)經(jīng)驗(yàn),,才有可能提取出有價(jià)值的目標(biāo)特征數(shù)據(jù),,并在此基礎(chǔ)上進(jìn)行推理預(yù)測(cè)和識(shí)別分類。而水下聲學(xué)滑翔機(jī),、浮標(biāo)等基于無(wú)人平臺(tái)的目標(biāo)屬性判別,,則是由信號(hào)處理設(shè)備自主完成,傳統(tǒng)水下聲目標(biāo)識(shí)別分類方法已無(wú)法滿足此要求,,因此,,需要目標(biāo)屬性判別具備智能化水平。
2010年,,美國(guó)國(guó)防高級(jí)研究項(xiàng)目署(DARPA)啟動(dòng)了“反潛持續(xù)跟蹤無(wú)人艇(ACTUV)”研究計(jì)劃,,旨在研發(fā)一種可長(zhǎng)時(shí)間在廣闊海域?qū)Φ驮胍舫R?guī)潛艇進(jìn)行探測(cè)、識(shí)別和跟蹤的新型無(wú)人水面艦艇,,首艘技術(shù)驗(yàn)證艇“海上獵手”號(hào)于2016年4月服役,,首次實(shí)現(xiàn)了水聲目標(biāo)自主識(shí)別,該型水聲探測(cè)裝備可進(jìn)行自主決策,,執(zhí)行復(fù)雜的搜索,、探測(cè)及跟蹤任務(wù)。
2015年10月,,DARPA率先提出跨域海上監(jiān)視和瞄準(zhǔn)(CDMaST)計(jì)劃,,旨在將現(xiàn)有反艦和反潛作戰(zhàn)中的探測(cè)、跟蹤,、定位,、識(shí)別、打擊及評(píng)估等作戰(zhàn)行動(dòng)分解到廣泛分布的無(wú)人機(jī)、無(wú)人艇,、無(wú)人艦,,以及無(wú)人水下航行器等低成本、無(wú)人化的作戰(zhàn)平臺(tái)上,,以迫使?jié)撛趯?duì)手投入更多資源成本開展體系對(duì)抗,。國(guó)內(nèi),張少康等通過(guò)提取目標(biāo)噪聲數(shù)據(jù)梅爾倒譜系數(shù)特征,,構(gòu)建長(zhǎng)短時(shí)記憶網(wǎng)絡(luò)識(shí)別分類模型,,初步實(shí)現(xiàn)了不依賴人工提取特征情況下的水聲目標(biāo)智能化識(shí)別分類。
⒍安全布放和回收技術(shù)
水下滑翔機(jī)組網(wǎng)應(yīng)用是達(dá)到海洋調(diào)查高分辨率要求的最好方法,,同時(shí)也是實(shí)現(xiàn)一定區(qū)域目標(biāo)探測(cè)的有效手段,,目前很多任務(wù)中都有滑翔機(jī)網(wǎng)絡(luò)的身影。隨著水下滑翔機(jī)及其網(wǎng)絡(luò)應(yīng)用的增加,,滑翔機(jī)安全布放回收問(wèn)題逐漸引起大家關(guān)注,,特別是應(yīng)用于目標(biāo)探測(cè)的水下聲學(xué)滑翔機(jī),由于其結(jié)構(gòu)的改變,,在一定程度上增加了布放與回收難度,。水下滑翔機(jī)安全布放回收技術(shù)主要包括海上安全作業(yè)與布放回收策略兩方面。水下滑翔機(jī)在海上布放時(shí)為避免滑翔機(jī)與船相撞發(fā)生損壞,,一般通過(guò)滑道或者吊繩迎風(fēng)布放,。水下滑翔機(jī)回收時(shí)根據(jù)其全球定位系統(tǒng)(GPS)位置進(jìn)行搜尋,為確保安全回收,,Slocum,、Spray還裝有備用Argos信標(biāo),當(dāng)發(fā)現(xiàn)水下滑翔機(jī)后,,回收船慢慢靠近,,并通過(guò)吊繩或下放小艇回收,在海況惡劣時(shí)也可通過(guò)吊網(wǎng)直接回收,。在水下滑翔機(jī)布放回收策略方面,,為實(shí)現(xiàn)多臺(tái)水下滑翔機(jī)的快速、高效回收,,Enrique研究了水下滑翔機(jī)的軌跡規(guī)劃策略,,回收船按規(guī)劃的航跡便可實(shí)現(xiàn)多臺(tái)水下滑翔機(jī)的快速回收。
四,、結(jié)束語(yǔ)
水下聲學(xué)滑翔機(jī)利用凈浮力和調(diào)整姿態(tài)角獲得剖面滑翔推進(jìn)力,,平臺(tái)自身只在調(diào)整凈浮力和姿態(tài)角時(shí)消耗少量能源,,具有功耗低,、效率高、續(xù)航力強(qiáng)、維護(hù)費(fèi)用低,、可重復(fù)使用和大量投放等特點(diǎn),,其作為一種海洋移動(dòng)觀探測(cè)設(shè)備,已廣泛應(yīng)用于海洋安全體系和水文環(huán)境觀測(cè)體系建設(shè),。隨著能源優(yōu)化策略,、人工智能、大數(shù)據(jù)等科學(xué)技術(shù)的發(fā)展,,水下聲學(xué)滑翔機(jī)必將在水下移動(dòng)目標(biāo)探測(cè),、戰(zhàn)場(chǎng)環(huán)境精細(xì)化測(cè)量與保障、基礎(chǔ)科學(xué)研究等領(lǐng)域發(fā)揮越來(lái)越重要的作用,。
同國(guó)外先進(jìn)水平相比,,我國(guó)雖然在滑翔機(jī)研制領(lǐng)域有了長(zhǎng)足的發(fā)展,但在物理機(jī)理分析,、人工智能信息自主處理及自主協(xié)同組網(wǎng)探測(cè)等方面仍存在較大差距,,這將是未來(lái)研究的重點(diǎn)?;诖?,文中詳細(xì)梳理了國(guó)內(nèi)外水下聲學(xué)滑翔機(jī)研究進(jìn)展,探討了其設(shè)計(jì)及規(guī)?;瘧?yīng)用涉及的多項(xiàng)關(guān)鍵技術(shù),,以期為國(guó)內(nèi)同類水下無(wú)人探測(cè)裝備的系統(tǒng)開發(fā)提供參考。

(注:此文章由“溪流之海洋人生”微信公眾平臺(tái)編輯整理)
地址:北京市海淀區(qū)藍(lán)靛廠東路金源時(shí)代商務(wù)中心A座11E
電話:010-88895713
傳真:010-88891029
郵箱:[email protected]
